Canny算法与其他边缘检测算法的对比
1.Canny算法的特点
Canny算法是由John
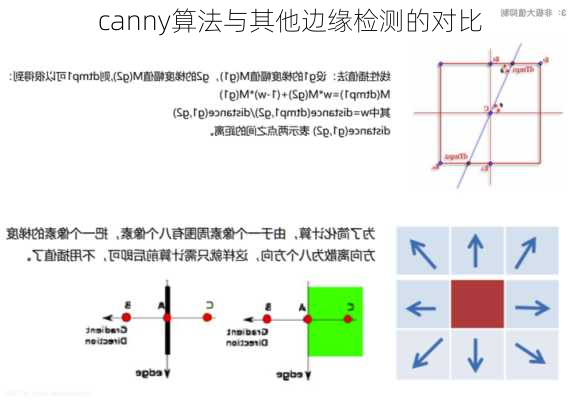
F.Canny于1986年提出的多级边缘检测算法。它的特点是能够提供低错误率、高定位性和最小响应的边缘检测结果。Canny算法的步骤包括高斯滤波、计算像素梯度、非极大值抑制、阈值滞后处理和孤立弱边缘抑制。这种算法在许多方面的应用都有着它的身影,因此,不管是为了学习或者工作,学习Canny算法的原理和实现都是非常有价值的。
2.Canny算法与其他算法的对比
相比于其他边缘检测算法,如Sobel算子、Prewitt算子、LoG算子等,Canny算法更为优异。这些算法通常是基于一阶或二阶差分算子,而Canny算法则是基于更复杂的计算过程,包括高斯滤波、梯度计算、非极大值抑制、双阈值处理等。这些额外的步骤使得Canny算法能够提供更准确、更可靠的边缘检测结果。
3.Canny算法的应用广泛性
Canny算法因其优良的性能,被广泛应用于图像处理、模式识别、机器视觉等领域。在实际应用中,边缘检测算法的技术趋势也是快速发展,Canny算法因其稳定的性能和广泛的适用性,仍然是一种标准的边缘检测算法。
4.Canny算法的局限性
尽管Canny算法是一种非常优秀的边缘检测算法,但它也有一些局限性。例如,任何边缘检测算法都不可能在未经处理的原始数据上很好地工作,所以第一步是对原始数据与高斯mask作卷积,得到的图像与原始图像相比有些轻微的模糊。此外,Canny算法中的双阈值处理需要预先设定阈值,这可能会对边缘检测的结果产生一定的影响。为了解决这些问题,人们一直在尝试对Canny算法进行改进,例如,使用自适应高斯滤波器和灰度梯度映射函数来确定最佳的双阈值。